NI 9512是C系列步进电机驱动接口模块,采用NI-RIO、NI-SoftMotion驱动,可以生成精确的步进脉冲和方向信号。通过硬件集成,在保证步进电机成本优势的同时,大幅提升了其运动性能、系统集成度和同步精度。本文将带你快速上手,重点讲解如何在LabVIEW环境中,通过NI‑SoftMotion驱动配置与运用NI 9512。
下面请跟随小编一起来学习一下吧!
本文分享:
NI 9512使用教程
一、NI 9512板卡
1、板卡介绍
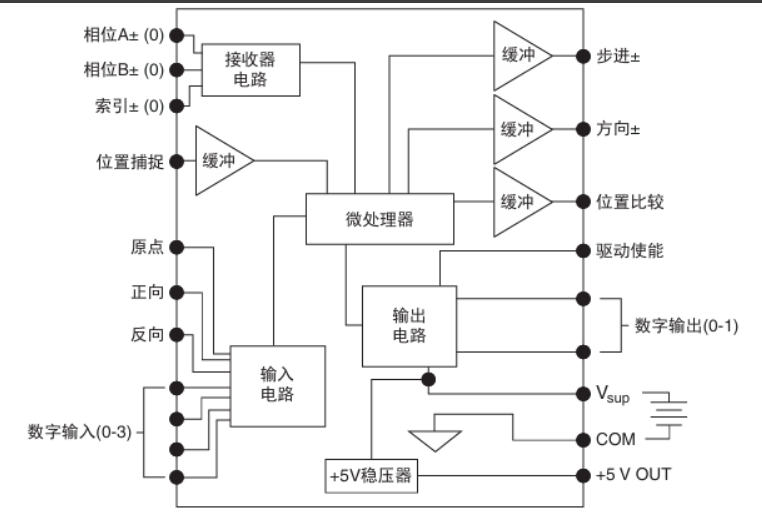
NI 9512是单轴、单编码器C系列步进电机驱动接口模块。板卡提供了用于单轴的步进驱动器接口信号、一套完整的运动I/O(包括用于原点开关和限位开关的输入I/O)、用于位置反馈的增量编码器输入以及通用输入和输出。 板卡还包含了高级运动功能,如位置捕获和位置比较,并可直接连接到P7000系列步进驱动器。 NI‑9512处理器运行样条插值引擎和NI申请专利的步长生成算法,可产生更平滑的运动,从而实现精确的步进运动控制。
2、原理框图
3、接线图
4、引脚图
DSUB引脚图
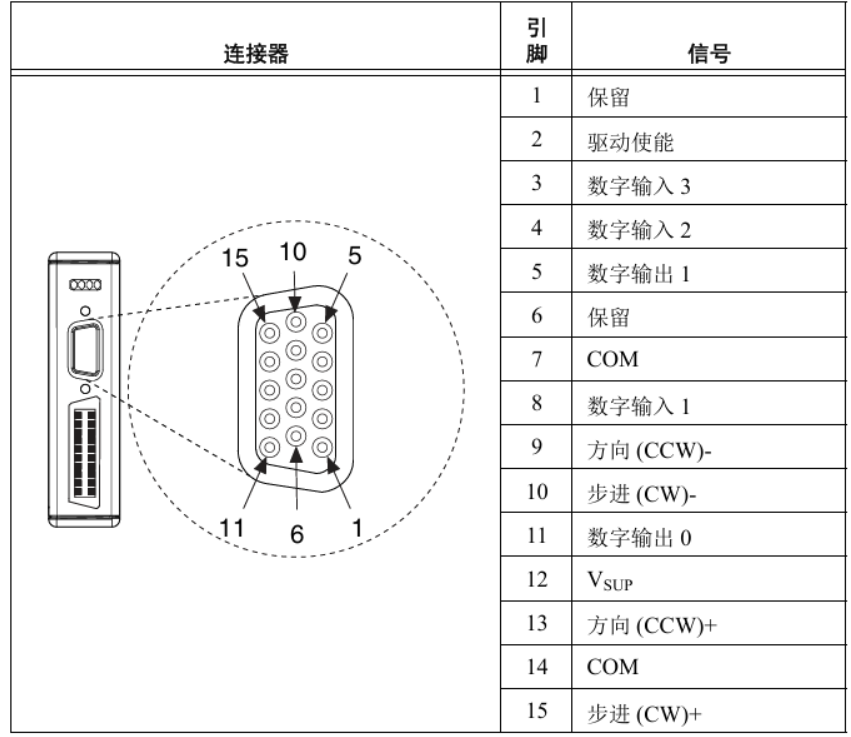
MDR连接器引脚图
二、步进指令信号
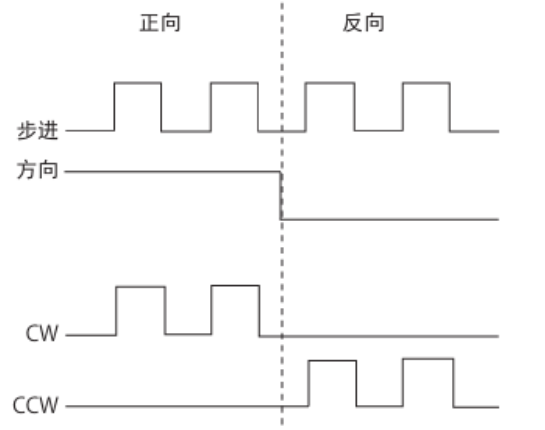
NI 9512驱动接口模块的步进指令输出信号分为两种,分别为步进和方向、正转(CW)和反转(CCW)脉冲输出。输出的模式可通过软件进行配置,以广泛兼容第三方驱动。
当配置为步进和方向模式时,步进信号发出的脉冲数决定了电机转动角度,方向信号就是电平信号,决定电机转动的方向。正转加高电平,反转加低电平。当电机朝一个方向转动时,此信号保持原有电平,不需要改变。
当配置为CW和CCW模式时,在CW输出上产生脉冲来指令正向运动,在CCW输出上产生脉冲来指令反向运动。
三、操作步骤
1、驱动配置
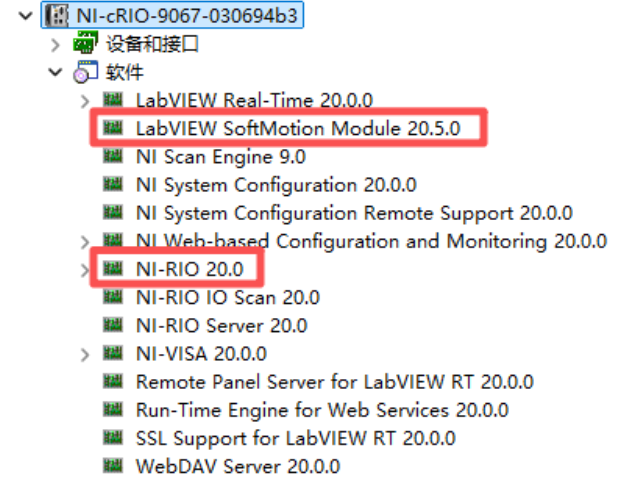
在上位机中安装NI-RIO、NI-SoftMotion驱动,将其添加至NI RT下位机中。
2、搭建项目
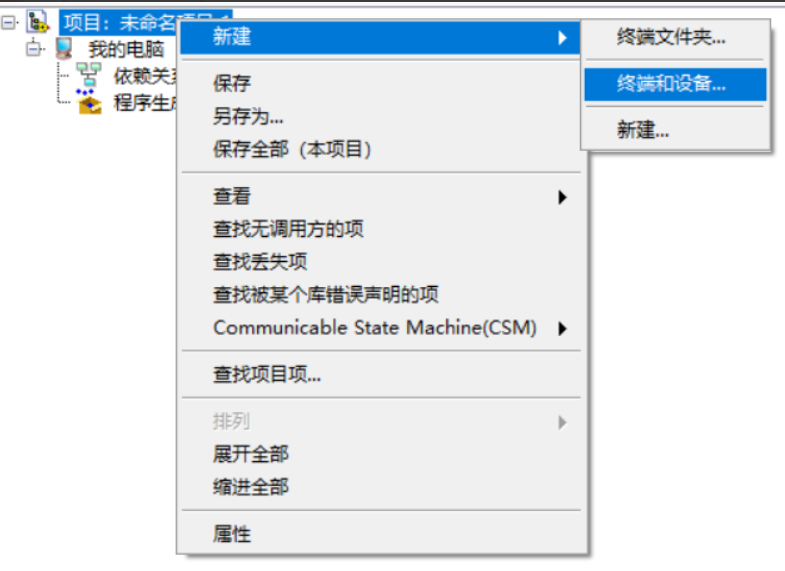
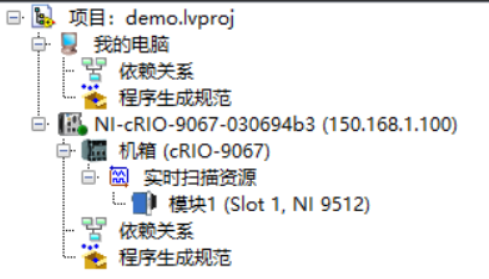
在LabVIEW中创建新项目,右键单击项目浏览器窗口中的项目项,从快捷菜单中选择新建»终端和设备。
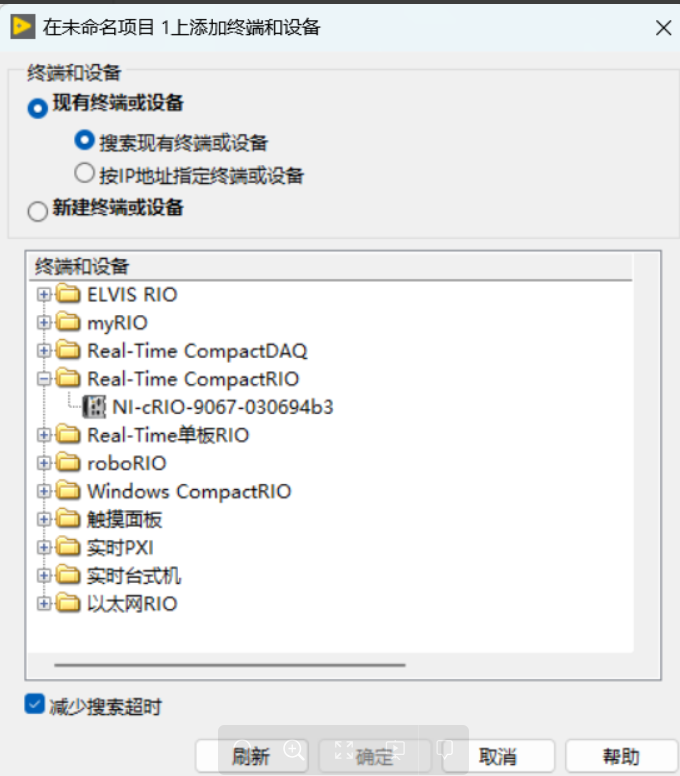
选择要添加至项目的CompactRIO控制器,然后单击确定。
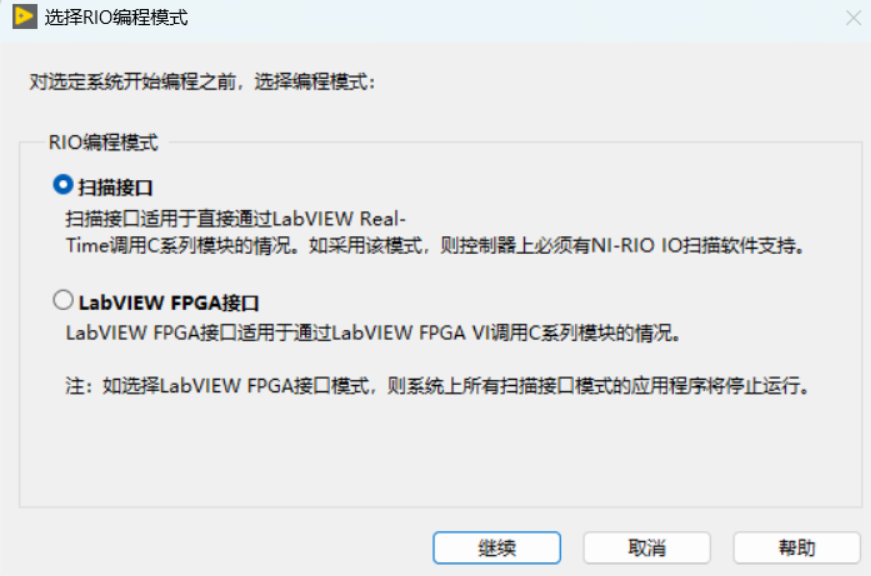
如已安装LabVIEW FPGA,将出现选择编程模式对话框。选择扫描接口,将系统置为扫描接口模式。
检测C系列模块。
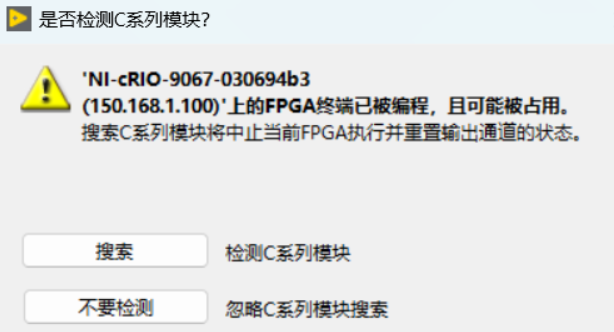
LabVIEW将控制器、机箱和所有模块添加至项目。
3、配置NI 9512轴
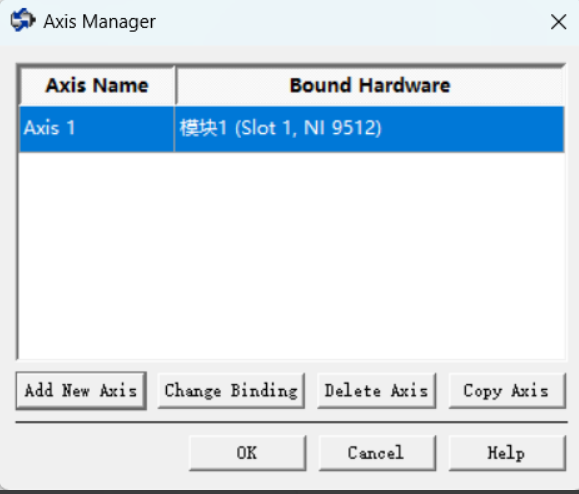
右键单击项目浏览器窗口中的终端,从快捷菜单中选择新建»NI SoftMotion Axis,打开Axis Manager对话框,单击Add New Axis。NI 9512自动绑定至NI SoftMotion轴。
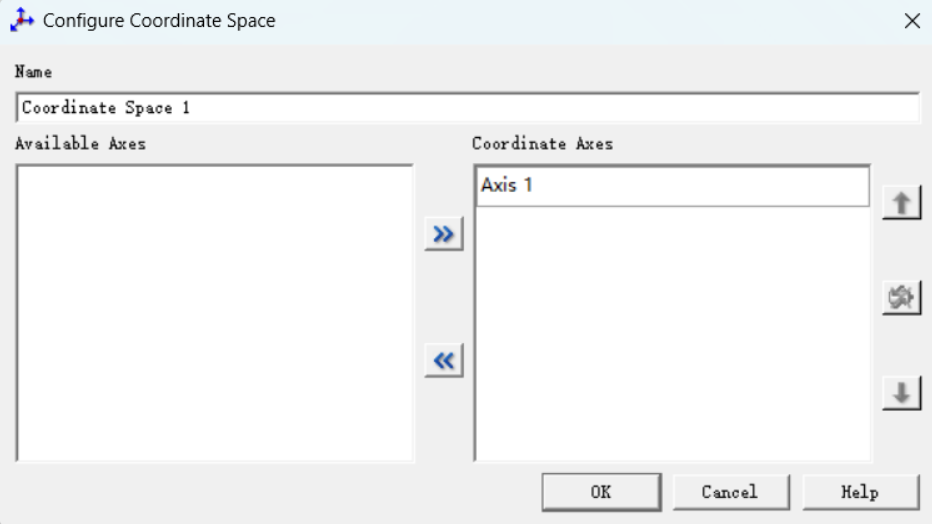
右键单击项目浏览器窗口中的终端,从快捷菜单中选择新建»NI Configure Coordinate Space,打开Configure Coordinate Space对话框,将Axis 1放入Coordinate Axes。
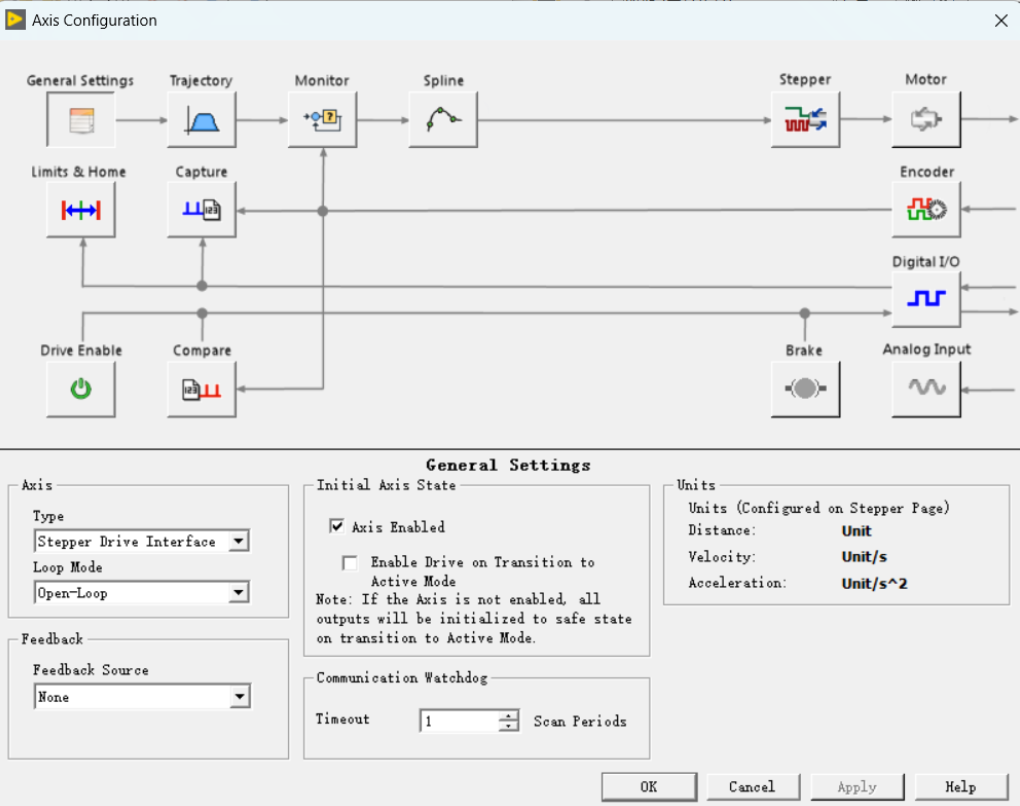
右键单击项目浏览器窗口中的轴并从快捷菜单中选择属性,打开Axis Configuration 对话框。
进行以下设置: 在General Settings页,将Loop Mode设为Open-Loop。配置为开环模式的轴生成步进输出。 在General Settings页,勾选Axis Enabled 和Enable Drive on Transition to Active Mode 复选框。这些选项在NI扫描引擎切换为“活动”模式时,将轴配置为自动激活。 在Limits & Home页,取消勾选Forward Limit和Reverse Limit中的Enable复选框。
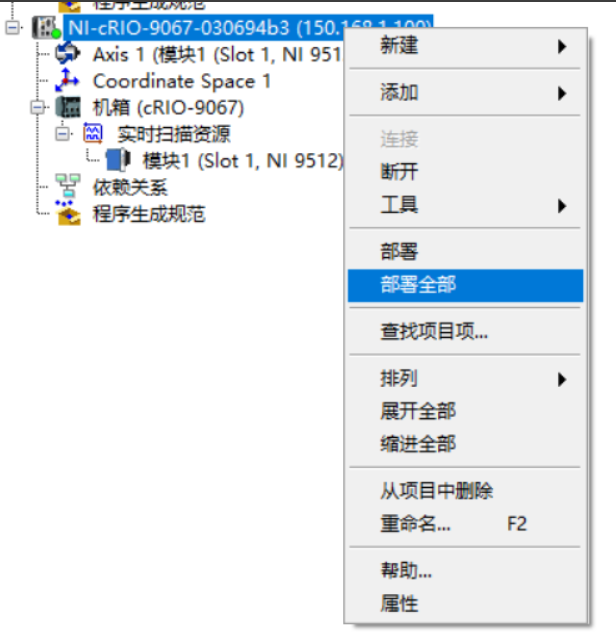
在项目浏览器窗口右键单击控制器项,并从快捷菜单中选择部署全部,将轴、坐标和轴设置部署至RT终端。
4、运行程序
在项目浏览器窗口中右键单击轴,从快捷菜单中选择Interactive Test Panel。
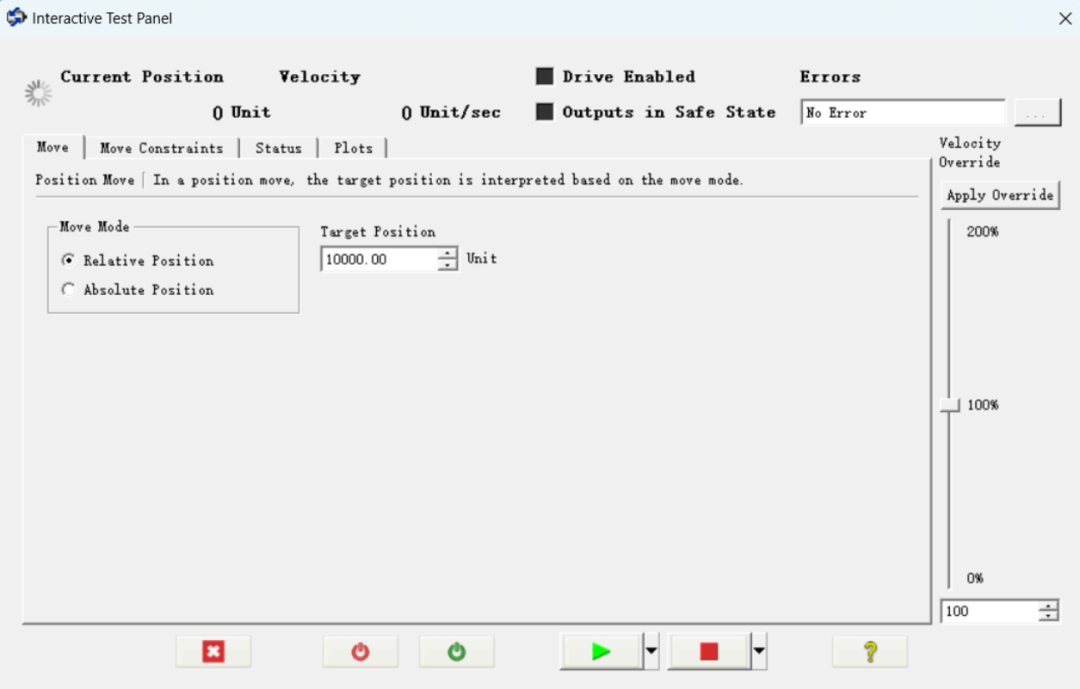
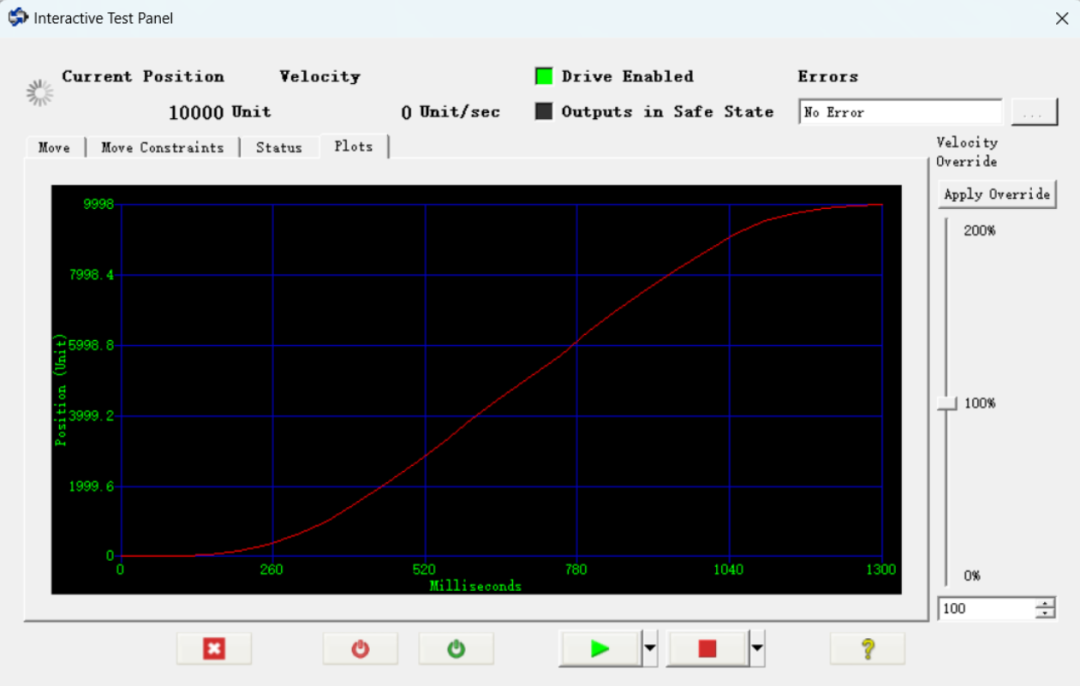
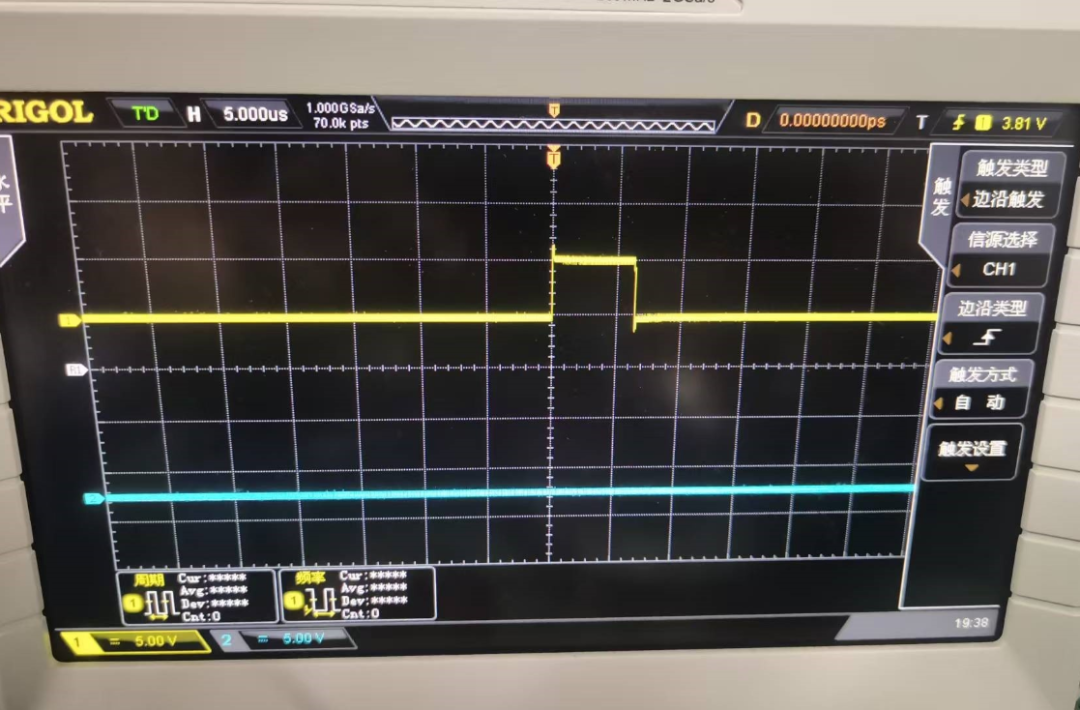
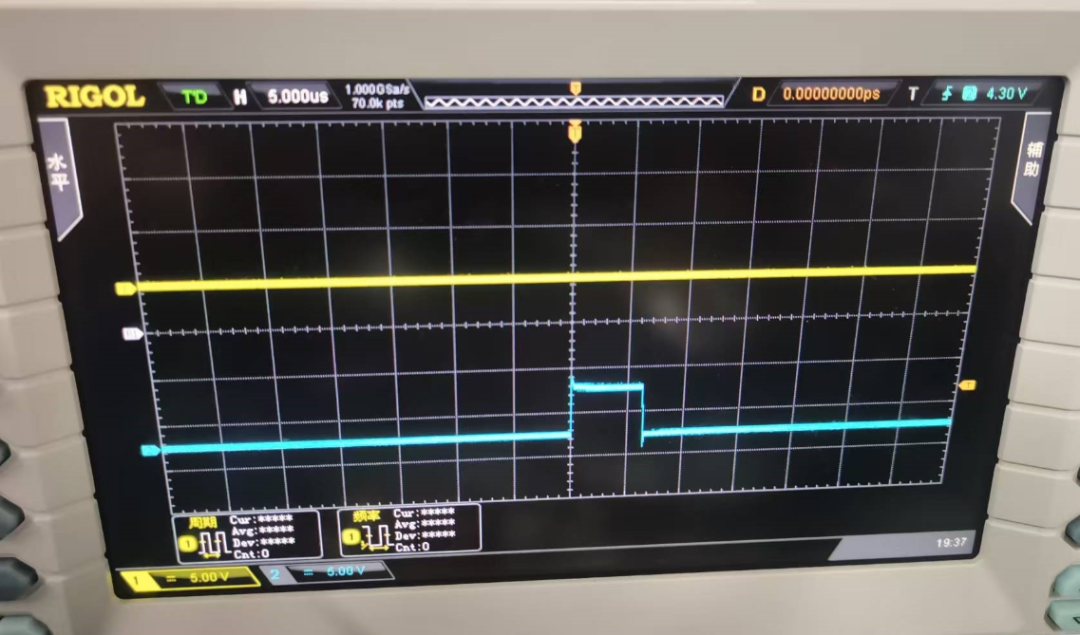
在Move Constraints 选项卡,设置Velocity、Acceleration/Deceleration 和 Acceleration Jerk/Deceleration Jerk的参数,点击“运行”,将会自动生成步进信号,同时会在Plots选项卡生成模拟轨迹。该轨迹为步进驱动器收到步进信号后理论的轨迹,最终将到达设定的目标。
可以在步进(CW)与方向(CCW)引脚,根据设定的步进和方向模式,检测到相应的步进指令信号。
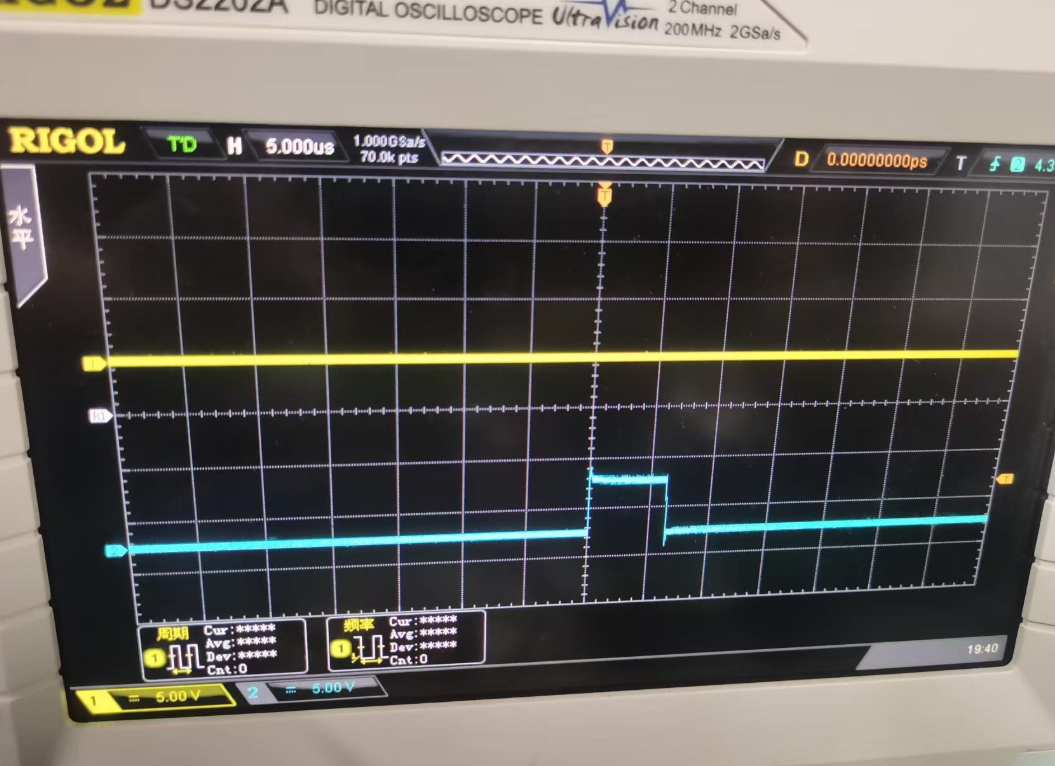
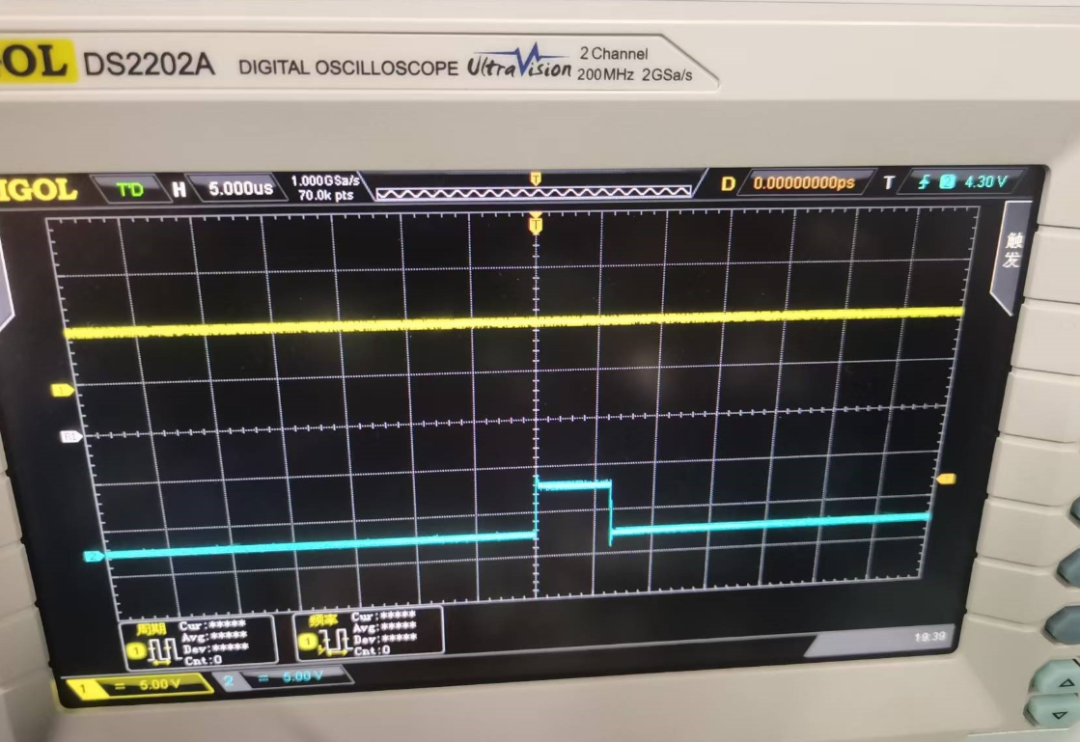
可以在步进(CW)与方向(CCW)引脚,根据设定的CW和CCW模式,检测到相应的步进指令信号。
以上就是NI 9512使用教程的全部内容啦。欢迎大家留言讨论,交流分享!更多关于测试系统中的实际软硬件应用知识,可关注本公众号/下方合集。
更多内容,敬请期待!
对LabVIEW编程技巧和相关内容感兴趣的工程师们,欢迎持续关注、留言和点赞,也可以私信小编各位的技术困惑和技术需求,以获取参加免费线下培训和技术交流的机会哦。